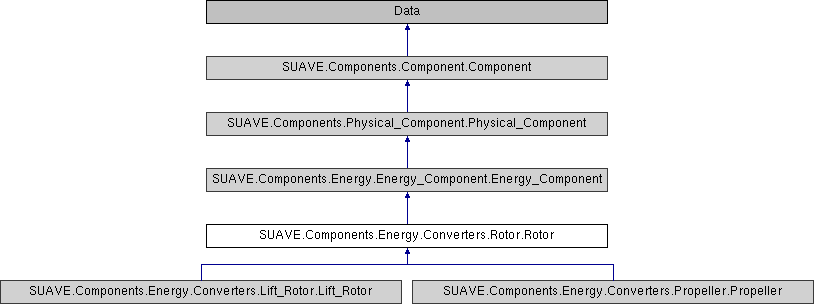
This is a general rotor component.
Assumptions:
None
Source:
None
| def SUAVE.Components.Energy.Converters.Rotor.Rotor.body_to_prop_vel |
( |
|
self | ) |
|
This rotates from the systems body frame to the propellers velocity frame
Assumptions:
There are two propeller frames, the vehicle frame describing the location and the propeller velocity frame
velocity frame is X out the nose, Z towards the ground, and Y out the right wing
vehicle frame is X towards the tail, Z towards the ceiling, and Y out the right wing
Source:
N/A
Inputs:
None
Outputs:
None
Properties Used:
None
| def SUAVE.Components.Energy.Converters.Rotor.Rotor.prop_vel_to_body |
( |
|
self | ) |
|
This rotates from the propeller's velocity frame to the system's body frame
Assumptions:
There are two propeller frames, the vehicle frame describing the location and the propeller velocity frame
velocity frame is X out the nose, Z towards the ground, and Y out the right wing
vehicle frame is X towards the tail, Z towards the ceiling, and Y out the right wing
Source:
N/A
Inputs:
None
Outputs:
None
Properties Used:
None
| def SUAVE.Components.Energy.Converters.Rotor.Rotor.spin |
( |
|
self, |
|
|
|
conditions |
|
) |
| |
Analyzes a general rotor given geometry and operating conditions.
Assumptions:
per source
Source:
Drela, M. "Qprop Formulation", MIT AeroAstro, June 2006
http://web.mit.edu/drela/Public/web/qprop/qprop_theory.pdf
Leishman, Gordon J. Principles of helicopter aerodynamics
Cambridge university press, 2006.
Inputs:
self.inputs.omega [radian/s]
conditions.freestream.
density [kg/m^3]
dynamic_viscosity [kg/(m-s)]
speed_of_sound [m/s]
temperature [K]
conditions.frames.
body.transform_to_inertial (rotation matrix)
inertial.velocity_vector [m/s]
conditions.propulsion.
throttle [-]
Outputs:
conditions.propulsion.outputs.
number_radial_stations [-]
number_azimuthal_stations [-]
disc_radial_distribution [m]
speed_of_sound [m/s]
density [kg/m-3]
velocity [m/s]
disc_tangential_induced_velocity [m/s]
disc_axial_induced_velocity [m/s]
disc_tangential_velocity [m/s]
disc_axial_velocity [m/s]
drag_coefficient [-]
lift_coefficient [-]
omega [rad/s]
disc_circulation [-]
blade_dQ_dR [N/m]
blade_dT_dr [N]
blade_thrust_distribution [N]
disc_thrust_distribution [N]
thrust_per_blade [N]
thrust_coefficient [-]
azimuthal_distribution [rad]
disc_azimuthal_distribution [rad]
blade_dQ_dR [N]
blade_dQ_dr [Nm]
blade_torque_distribution [Nm]
disc_torque_distribution [Nm]
torque_per_blade [Nm]
torque_coefficient [-]
power [W]
power_coefficient [-]
Properties Used:
self.
number_of_blades [-]
tip_radius [m]
twist_distribution [radians]
chord_distribution [m]
orientation_euler_angles [rad, rad, rad]
| def SUAVE.Components.Energy.Converters.Rotor.Rotor.vec_to_vel |
( |
|
self | ) |
|
This rotates from the propellers vehicle frame to the propellers velocity frame
Assumptions:
There are two propeller frames, the vehicle frame describing the location and the propeller velocity frame
velocity frame is X out the nose, Z towards the ground, and Y out the right wing
vehicle frame is X towards the tail, Z towards the ceiling, and Y out the right wing
Source:
N/A
Inputs:
None
Outputs:
None
Properties Used:
None


 Public Attributes inherited from SUAVE.Components.Energy.Energy_Component.Energy_Component
Public Attributes inherited from SUAVE.Components.Energy.Energy_Component.Energy_Component 1.8.15
1.8.15