|
SUAVE
2.5.2
An Aerospace Vehicle Environment for Designing Future Aircraft
|


|
|
SUAVE
2.5.2
An Aerospace Vehicle Environment for Designing Future Aircraft
|
|
Public Member Functions | |
| def | __defaults__ (self) |
| def | evaluate_thrust (self, state) |
| def | unpack_unknowns (self, segment) |
| def | residuals (self, segment) |
| def | add_unknowns_and_residuals_to_segment (self, segment, initial_voltage=None, initial_power_coefficient=0.02, initial_battery_cell_temperature=283., initial_battery_state_of_charge=0.5, initial_battery_cell_current=5.) |
Public Attributes | |
| propeller_motors | |
| lift_rotor_motors | |
| propellers | |
| lift_rotors | |
| esc | |
| avionics | |
| payload | |
| battery | |
| nacelle_diameter | |
| engine_length | |
| number_of_propeller_engines | |
| number_of_lift_rotor_engines | |
| voltage | |
| tag | |
| use_surrogate | |
| generative_design_minimum | |
| identical_propellers | |
| identical_lift_rotors | |
 Public Attributes inherited from SUAVE.Components.Energy.Networks.Network.Network Public Attributes inherited from SUAVE.Components.Energy.Networks.Network.Network | |
| tag | |
| generative_design_max_per_vehicle | |
| non_dimensional_origin | |
| number_of_engines | |
| engine_length | |
| wing_mounted | |
| areas | |
| Public Attributes inherited from SUAVE.Components.Physical_Component.Physical_Component | |
| tag | |
| mass_properties | |
| origin | |
| symmetric | |
| Public Attributes inherited from SUAVE.Components.Component.Component | |
| tag | |
| origin | |
| generative_design_max_per_vehicle | |
| generative_design_characteristics | |
| generative_design_special_parent | |
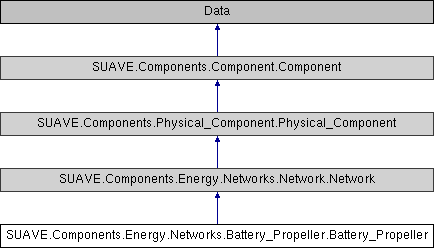
This is a simple network with a battery powering a propeller through
an electric motor
This network adds 2 extra unknowns to the mission. The first is
a voltage, to calculate the thevenin voltage drop in the pack.
The second is torque matching between motor and propeller.
Assumptions:
The y axis rotation is used for rotating the propeller about the Y-axis for tilt rotors and tiltwings
Source:
None
| def SUAVE.Components.Energy.Networks.Battery_Propeller.Battery_Propeller.__defaults__ | ( | self | ) |
This sets the default values for the network to function.
Assumptions:
None
Source:
N/A
Inputs:
None
Outputs:
None
Properties Used:
N/A
Reimplemented from SUAVE.Components.Energy.Networks.Network.Network.
| def SUAVE.Components.Energy.Networks.Battery_Propeller.Battery_Propeller.add_unknowns_and_residuals_to_segment | ( | self, | |
| segment, | |||
initial_voltage = None, |
|||
initial_power_coefficient = 0.02, |
|||
initial_battery_cell_temperature = 283., |
|||
initial_battery_state_of_charge = 0.5, |
|||
initial_battery_cell_current = 5. |
|||
| ) |
This function sets up the information that the mission needs to run a mission segment using this network
Assumptions:
None
Source:
N/A
Inputs:
segment
initial_voltage [v]
initial_power_coefficient [float]s
Outputs:
segment.state.unknowns.battery_voltage_under_load
segment.state.unknowns.propeller_power_coefficient
segment.state.conditions.propulsion.propeller_motor_torque
segment.state.conditions.propulsion.propeller_torque
Properties Used:
N/A
| def SUAVE.Components.Energy.Networks.Battery_Propeller.Battery_Propeller.evaluate_thrust | ( | self, | |
| state | |||
| ) |
Calculate thrust given the current state of the vehicle
Assumptions:
Caps the throttle at 110% and linearly interpolates thrust off that
Source:
N/A
Inputs:
state [state()]
Outputs:
results.thrust_force_vector [newtons]
results.vehicle_mass_rate [kg/s]
conditions.propulsion:
rpm [radians/sec]
current [amps]
battery_power_draw [watts]
battery_energy [joules]
battery_voltage_open_circuit [V]
battery_voltage_under_load [V]
motor_torque [N-M]
propeller_torque [N-M]
Properties Used:
Defaulted values
| def SUAVE.Components.Energy.Networks.Battery_Propeller.Battery_Propeller.residuals | ( | self, | |
| segment | |||
| ) |
This packs the residuals to be sent to the mission solver.
Assumptions:
None
Source:
N/A
Inputs:
state.conditions.propulsion:
motor_torque [N-m]
propeller_torque [N-m]
unknowns specific to the battery cell
Outputs:
residuals specific to battery cell and network
Properties Used:
N/A
| def SUAVE.Components.Energy.Networks.Battery_Propeller.Battery_Propeller.unpack_unknowns | ( | self, | |
| segment | |||
| ) |
This is an extra set of unknowns which are unpacked from the mission solver and send to the network.
Assumptions:
None
Source:
N/A
Inputs:
state.unknowns.propeller_power_coefficient [None]
unknowns specific to the battery cell
Outputs:
state.conditions.propulsion.propeller_power_coefficient [None]
conditions specific to the battery cell
Properties Used:
N/A
 1.8.15
1.8.15